


Overview
The MG996R Servo Motor is an all metal gear servo motor operating on a wide voltage range of 4.8V to 6.6V DC, it offers exceptional torque of 11 kg/cm, ensuring performance in various applications. Its swift reaction speed (no load speed of 0.19 seconds / 60 degrees at 4.8V and 0.15 seconds / 60 degrees at 6.0V, makes it a preferred choice for many applications like Robots, Robotic Arms, RC plane, RC car etc.
Dimensions
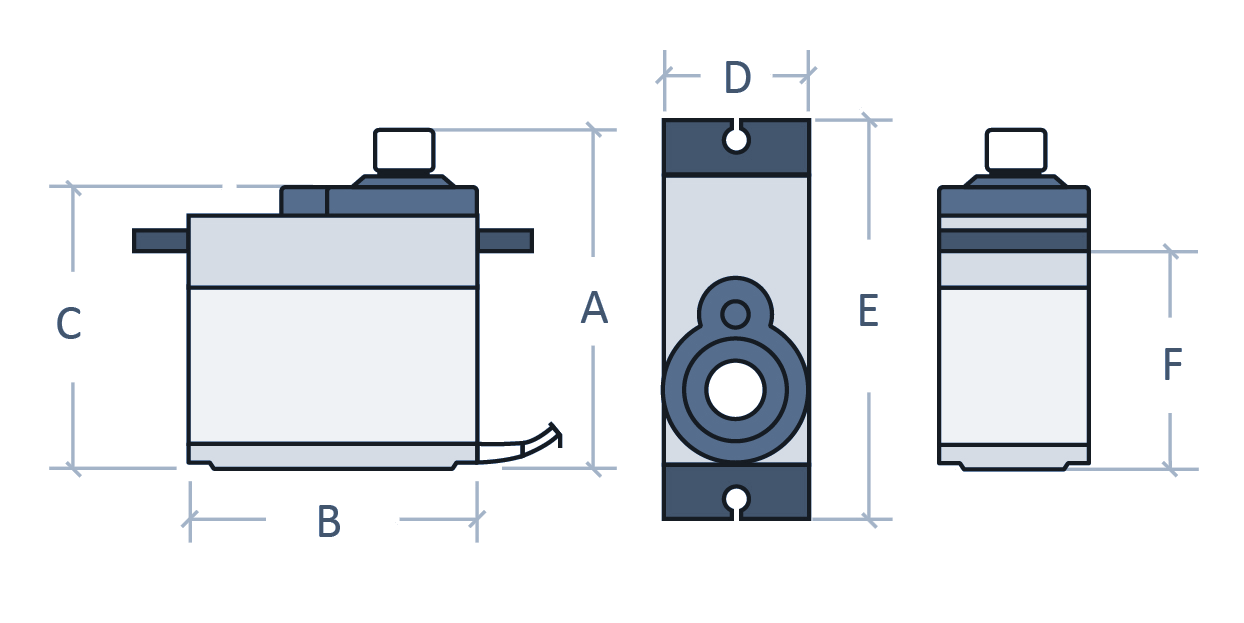
| A | B | C | D | E | F |
| 42.7 | 40.9 | 37 | 20 | 54 | 26.8 |
| Unit: Milimetre (mm) | |||||
Specifications
| Voltage | 4.8V to 6.6V DC |
| Stall Torque | 9.4 kg/cm at 4.8V 11 kg/cm at 6.0V |
| Current | 170 mA (No Load Current) 10 mA (Idle Current) 1400 mA (Stall Current) |
| Speed | 0.19 seconds / 60 degrees at 4.8V 0.15 seconds / 60 degrees at 6.6V |
| Gear Type | Metal |
| Cable Length | 30 cm |
| Plug / Connector | JR FUTABA Universal |
| Operating Temperature | 0°C to 55°C |
| Dimensions |
40.7 x 19.7 x 42.9 mm |
| Weight | 55g |
Pinout
Servo motor pinout and wire color coding.
| No. | Pins | Color |
| 1 | Signal | Yellow |
| 2 | VCC | Red |
| 3 | GND | Brown |
Connections & Code
Connection
- Signal: Connect to pin D9
- VCC: You may connect this to 5V pin on arduino UNO but we recommend to connect it to an external power supply between 4.8V to 6.6V DC.
- GND: Connect to GND. Make sure you connect all ground pins together. If you are using an external power supply connect the power supply ground to aduino UNO GND.
Code
Before we move into coding, first we need to install the Servo library written by Michael Margolis, Arduino in the Arduino IDE.
You can install this library by directly going to Tools > Manage Libraries which opens the Library Manager. In the library manager search for Servo using the search bar and click on the install button to install the latest version of the Servo library.
/* Sweep*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
}
Opps
Sorry, it looks like some products are not available in selected quantity.