





Overview
The RadioLink Pixhawk 2.4.8 is an open-source flight controller designed for unmanned aerial vehicles (UAVs) such as multicopters, fixed-wing aircraft, VTOLs, and other autonomous platforms. Built on the foundation of the original 3DR Pixhawk, this flight controller offers enhanced stability, precision, and reliability.
It is powered by a 32-bit STM32F427 Cortex M4 processor with an FPU, operating at 168 MHz, supported by 256 KB RAM and 2 MB Flash memory. This ensures high-speed data processing and stable flight performance. Additionally, the STM32F103C8T6 coprocessor handles auxiliary tasks efficiently.
To provide accurate motion sensing and environmental data, the sensor pack includes an MPU6000 gyroscope and accelerometer, an IST8310 magnetometer, and an MS5611 barometer, ensuring precise altitude, orientation, and navigation control. The flight controller operates within a working temperature range of -10°C to 55°C and a humidity tolerance of 0% to 95%.
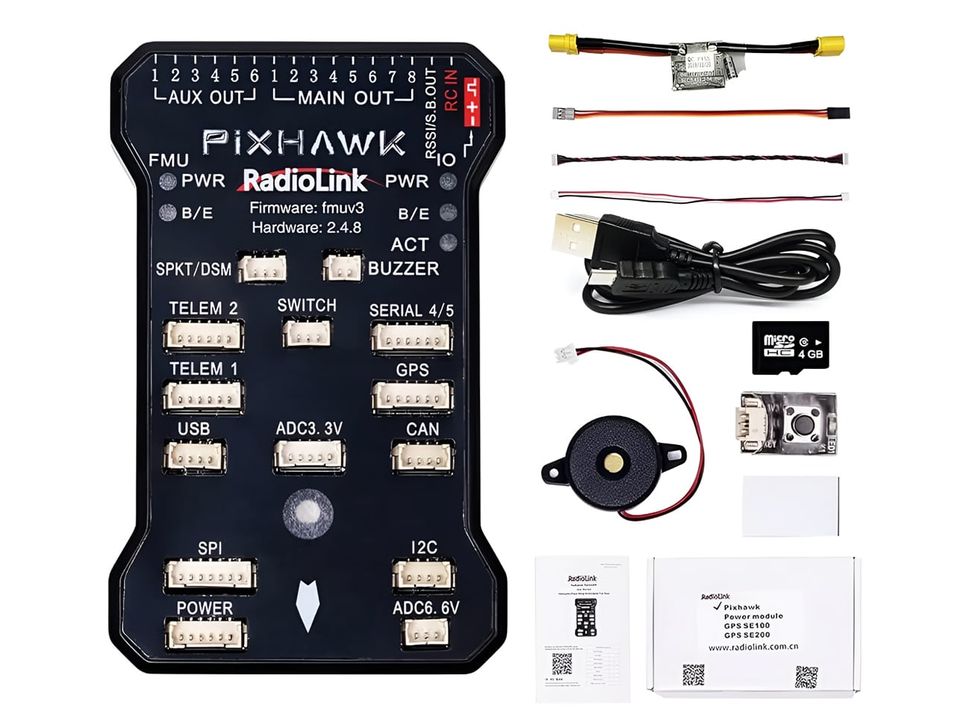
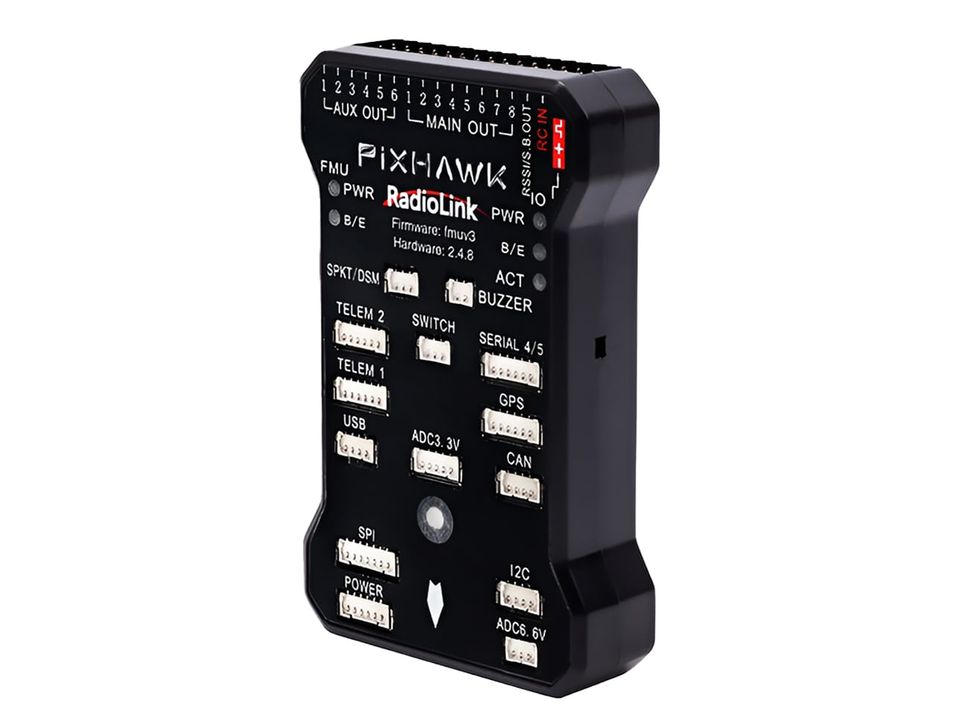
For connectivity and expandability, the Pixhawk 2.4.8 features multiple ports, allowing seamless integration with various peripherals. It supports 8 PWM main output ports for motors or servos and 6 auxiliary PWM outputs for additional accessories like gimbals or lights. It includes dedicated SBUS and PPM input ports for receiver connections and 2 MAVLink UART ports with CTS/RTS for telemetry modules and OSD devices. Other available ports include USB for firmware updates and configuration, CAN for CAN bus peripherals, I2C and SPI for external sensors, and GPS UART for GPS modules. The controller also has an SD card slot for data logging and a buzzer port for audio alerts.
The power module of the RadioLink Pixhawk 2.4.8 operates within an input voltage range of 4.8V to 5.4V, with a power consumption of 5V 100mA. The flight controller is compatible with ArduPilot firmware, enabling flexible configurations, mission planning, and real-time telemetry monitoring. It supports software like Mission Planner and APM Planner for easy parameter adjustments and mission setup.
With its compact dimensions of 81.5 mm x 45.3 mm x 15.5 mm and lightweight build of 38g, the Pixhawk 2.4.8 is designed for efficiency and ease of installation in a variety of UAV platforms. Its robust features make it an ideal choice for both DIY drone builders and commercial UAV developers.
Specification
Technical specifications for RadioLink PIXHAWK 2.4.8 Flight Controller.
| Specification | Details |
|---|---|
| Main Control Chip | 32-bit STM32F427 Cortex M4 core with FPU, 168 MHz, 256 KB RAM, 2 MB Flash |
| Sensor System | Gyroscope/Accelerometer: InvenSense MPU6000 (6000D) 3-axis Magnetometer: IST8310 3-axis Barometer: MEAS MS5611 |
| Input Voltage | 4.8V to 5.4V |
| Power Consumption | 5V 100mA |
| Dimensions | 81.5 mm x 45.3 mm x 15.5 mm |
| Weight | 38g |
| Working Temperature | -10℃ to 55℃ |
| Storage Temperature | -20℃ to 85℃ |
| Humidity | 0% to 95% |
| Firmware | Supports ArduPilot firmware |
| Software | Compatible with Mission Planner, APM Planner, and other GCS software |
| Supported Models | Multicopters, fixed-wing aircraft, helicopters, cars, boats, robots, mowers |
Ports & Pinouts
| Port | Description |
|---|---|
| Main Output Ports | 8 PWM outputs for connecting motors or servos |
| Auxiliary Ports | 6 configurable PWM outputs for additional devices like gimbals or lights |
| SBUS Input | For connecting SBUS-compatible receivers |
| PPM Input | For connecting PPM-compatible receivers |
| SPK/DSM Port | For connecting Spektrum DSM receivers |
| MAVLink UART Ports | 2 ports with CTS/RTS for telemetry modules or OSD devices |
| USB Port | For connecting to a computer for firmware updates and configuration |
| Buzzer Port | For connecting an external buzzer for audible alerts |
| Safety Switch Port | For connecting an external safety switch |
| ADC 3.3V Port | Analog-to-digital converter port for voltage measurements up to 3.3V |
| ADC 6.6V Port | Analog-to-digital converter port for voltage measurements up to 6.6V |
| SERIAL4/5 Port | Additional serial ports for peripherals |
| GPS UART Port | For connecting GPS modules |
| CAN Port | For CAN bus peripherals |
| SPI Port | Serial Peripheral Interface port for sensors or other devices |
| I2C Port | For connecting I2C-compatible peripherals like external compasses or sensors |
| SD Card Slot | For inserting a microSD card to log flight data |
Opps
Sorry, it looks like some products are not available in selected quantity.